Outils pour utilisateurs
Panneau latéral
wiki:flossmanuals:boitier-interactif-01:accueil
Table des matières
Boîtier Interactif : Apprendre la profondeur dans un tableau
- Porteur(s) du projet : Lise Irmann (DNMADE DG2), Damien MUTI DESGROUAS (Prof. de Numérique)
- Date : 03/2021
- Contexte : projet “Mallette pédagogique” au Musée des Beaux Arts - 2021
- Fichiers : liseirrmann_dispositifs.pdf
- Lien :
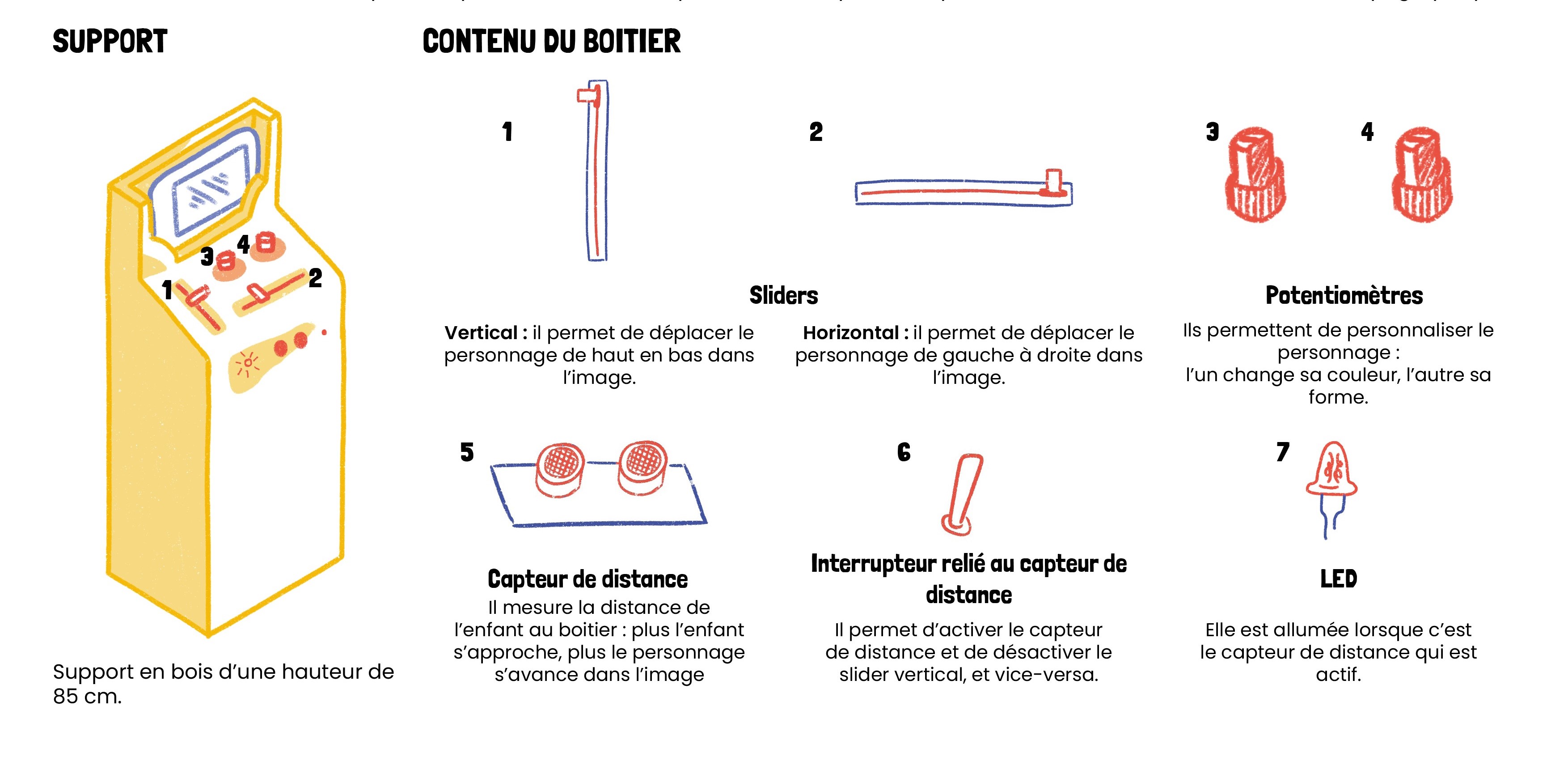
- Capteurs/Actionneurs :
- 1 Capteur de distance Ultrasonic Grove (mettre le lien…)
- 2 Potentiomètres Grove
- 2 Sliders (potentiomètres) Grove
- 1 bouton poussoir Grove
- 1 module LED Grove
- 1 LED
Intentions : explication du projet et objectifs
Le Contexte
Commande de malette pédagogique pour les enfants de 5-6 ans de la part du musée de Beaux Arts de Marseille. Chaque élève propose des dispositifs qui pourraient s’insérer dans la malette, en se basant sur un ou plusieurs des tableaux proposés par le musée.
Les Objectifs
Permettre aux enfants d’appréhender la profondeur, la perspective, qui sont des concepts difficiles pour leur âge. Qu’est ce qui est grand? Petit? Loin? Près? Apprendre aux enfants à se repérer dans l’espace.
Le Dispositif
Une tablette / un ordinateur tactile affiche le tableau d’Émile LOUBON. Elle est reliée à un boitier Arduino, avec des sliders, des potentiomètres et un capteur de distance. Ceux-ci permettent à l’utilisateur de déplacer un personnage dans le tableau.
Il peut le faire de deux différentes manières :
- de haut en bas : le personnage change de taille et de saturation
- de droite à gauche : le personnage ne change pas
Ainsi, le médiateur peut se servir du boitier pour démontrer la perspective aux enfants. Ensuite, les enfants volontaires peuvent passer à tour de rôle pour s’en servir pendant que leurs camarades se servent du kit tampographique.
Plans et schémas de fonctionnement
Programmes
Arduino
Le montage Arduino et le programme associé a pour but de mesurer les valeurs de plusieurs potentiomètres et sliders, d'un bouton et d'un capteur de distance à ultrason et de les envoyer au programme Processing pour traitement. Le code est le suivant : boitier_interactif_arduino.zip
#include "Ultrasonic.h"
Ultrasonic ultrasonic(7); // capteur de distance
int Slider1 = 0; // Slider 1 : xPerso
byte Slider1Pin = A0;
byte Slider2Pin = A1; // Slider 2 : yPerso
int Potentiometre1 = 0; // Potentiomètre 1 : ChoixPerso
byte Potentiometre1Pin = A2;
int Potentiometre2 = 0; // Potentiomètre 2 : CouleurPerso
byte Potentiometre2Pin = A3;
int ChoixMesureDistance = 0; // Bouton poussoir - 0 : mesure de distance par slider 2 (yPerso). 1 : Mesure de distance par le capteur de distance
byte boutonPoussoirPin = 2; // broche de lecture du bouton poussoir
int Distance = 0; // distance lue sur le capteur de distance // Attention MeasureInCentimeters() renvoie un type "long"
int inByte = 0; // incoming serial byte
byte ledPin = 8; // broche de commande de la LED
byte etat_bouton = 0; //La variable « etat_bouton » mémorise l’état HIGH ou LOW de la pate d’entrée
byte old_etat_bouton = 0; //La variable « old_etat_bouton » mémorise l’ancien état de la variable « etat_bouton »
byte etat_led = 0; //La variable « etat_led » mémorise l’état 1 (allumée) ou 0 (éteinte) de la led.
boolean debug = false;
boolean debug_Com_Serial = false;
void setup() {
// start serial port at 9600 bps:
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
pinMode(boutonPoussoirPin, INPUT); // digital sensor is on digital pin D2
pinMode(ledPin, OUTPUT); // LED sur D7
if (!debug) {
establishContact(); // send a byte to establish contact until receiver responds
}
}
void loop() {
gestionBouton();
// Si une donnée arrive dans le port série venant de processing = LIre les nouvelles valeurs des différents capteurs
if (!debug) { // mode normal
if (Serial.available() > 0) {
// lecture de la donnée sur le port série : lettre A
inByte = Serial.read();
if (inByte == 'A') { // vérification du caractère envoyé par Processing
// mesure sur les différents capteurs
gestionCapteurs();
// Envoi des valeurs lues sur les différents capteurs vers Processing
envoiMesureVersProcessing();
if (debug_Com_Serial) { ///// Debug
envoiMesureSurPortSerial();
}
}
}
}
else { // mode debug
// mesure sur les différents capteurs
gestionCapteurs();
// Envoi des valeurs lues sur les différents capteurs
envoiMesureSurPortSerial();
delay(500);
}
}
void establishContact() {
while (Serial.available() <= 0) {
Serial.print('A'); // send a capital A
delay(300);
}
}
void gestionBouton() {
// mesure de l'état du bouton
etat_bouton = digitalRead(boutonPoussoirPin); // lit et mémorise l’état en entrée de la pate 2
if ((etat_bouton == LOW) && (old_etat_bouton == HIGH)) {
// si l’entrée 2 est à l’état LOW (bouton appuyé) et que juste précédemment le bouton est ouvert
etat_led = 1 - etat_led ; // inverse l’état de la led
delay(10); // patienter 10ms pour éviter les rebonds avant d’allumer la led
}
old_etat_bouton = etat_bouton; // sauvegarde la nouvelle valeur
ChoixMesureDistance = etat_led ; // choix du capteur de distance Ultrason ou du Slider
if (etat_led == 1) {//si la led doit être allumée
digitalWrite(ledPin, HIGH); // allumer la LED
}
else { // si la led est éteinte
digitalWrite(ledPin, LOW); // éteindre la LED
}
}
void gestionCapteurs() {
// lecture des données sur les différents capteurs. On divise par 4 pour ramener la valeur entre 0 et 255
Potentiometre1 = map(analogRead(Potentiometre1Pin), 0, 1023, 0, 3.5); //ChoixPerso : 0, 1, 2 (3 personnages). Attention : on a mis 3.5 car sinon, le déclenchement du 2ième personage s'effectuer trop tardivement
// delay 10ms to let the ADC recover:
delay(10);
Potentiometre2 = analogRead(Potentiometre2Pin) / 4; //CouleurPerso
// delay 10ms to let the ADC recover:
delay(10);
Slider1 = analogRead(Slider1Pin) / 4; // xPerso
// delay 10ms to let the ADC recover:
delay(10);
// lecture de la distance avec le capteur ultrason ou le Slider 2
if (ChoixMesureDistance == 1) { // Capteur de distance ultrason
Distance = map(ultrasonic.MeasureInCentimeters(), 0, 400, 0, 255); // mesure de la distanceentre 0 et 400cm et ramener cette valeur entre 0 et 255
}
else {
Distance = analogRead(Slider2Pin) / 4; //yPerso lu sur Slider 2
}
}
void envoiMesureVersProcessing() {
Serial.write(Potentiometre1); //ChoixPerso
Serial.write(Potentiometre2); //CouleurPerso
Serial.write(Slider1); // xPerso
Serial.write(Distance);//distance - y Perso
}
void envoiMesureSurPortSerial() {
Serial.println("");
Serial.print("etat_led = ");
Serial.print(etat_led); //etat_led
Serial.print(" ChoixPerso = ");
Serial.print(Potentiometre1); //ChoixPerso
Serial.print(" CouleurPerso = ");
Serial.print(Potentiometre2); //CouleurPerso
Serial.print(" xPerso = ");
Serial.print(Slider1); // xPerso
Serial.print(" yPerso = ");
Serial.print(Distance);//distance - yPerso
Serial.println("");
}
Processing
Programme initial
Le programme Processing a pour but de récupérer les différentes données envoyées par la carte Arduino. Chaque donnée constitue un paramètre d'affichage permettant de sélectionner un personnage, modifier sa position et sa taille dans une image.
Le rendu est le suivant :

Le programme est le suivant : boitier_interactifprocessing_2.zip
import processing.serial.*;
int bgcolor; // Background color
int fgcolor=255; // Fill color
Serial myPort; // The serial port
int NbData = 4; // nombre de données à récupérer de la carte Arduino
int[] serialInArray = new int[NbData]; // Where we'll put what we receive
int serialCount = 0; // A count of how many bytes we receive
int ChoixPerso, CouleurPerso, ChoixMesureDistance, Distance, SaturPerso; // Starting position of the ball
boolean firstContact = false; // Whether we've heard from the microcontroller
float xPerso, yPerso, sPerso;
PImage loubon, bouvier,img;
color c =color(#192A76);
int r = 25, g = 42, b=118;
PImage imgMask;
void setup() {
size(1000,570); // Stage size
noStroke(); // No border on the next thing drawn
// Initialisation des variables
ChoixPerso=0; // Potentiomètre 1
CouleurPerso = 0; //Potentiomètre 2
xPerso = 0.76*width; // Slider 1
yPerso = 0.84*height; // Slider 2 - Distance
sPerso = 2000; //Taille du personnage
SaturPerso = 255;
bouvier = loadImage("Images/test2/BouvierCarre.png"); //Image du personnage
loubon= loadImage("Images/Loubon_-_Vue_de_Marseille.jpg"); // Image du fond
img = createImage(bouvier.width, bouvier.width, ARGB);
image(loubon,0,0);
colorMode(HSB);
// Print a list of the serial ports, for debugging purposes:
printArray(Serial.list());
imgMask = loadImage("Images/mask.png");
imgMask = createImage(bouvier.width, bouvier.width, ARGB); //création d'un masque pour effacer les anciennes images
// I know that the first port in the serial list on my mac
// is always my FTDI adaptor, so I open Serial.list()[0].
// On Windows machines, this generally opens COM1.
// Open whatever port is the one you're using.
String portName = Serial.list()[0];
myPort = new Serial(this, portName, 9600);
}
void draw() { /////////////////////////////////////// r@Lise : ajouter le graphisme...
imageMode(CENTER);
image(loubon,width/2,height/2);
if (ChoixPerso == 0) { //Changer l'image selon la position du potentiomètre
bouvier = loadImage("Images/test2/BouvierCarre.png");
img.mask(imgMask); //Masque l'image précédente lorsqu'on change d'image
}
if (ChoixPerso == 1){
bouvier = loadImage("Images/test2/ArbreCarre.png");
img.mask(imgMask);
}
if (ChoixPerso == 2){
bouvier = loadImage("Images/test2/MoulinCarre.png");
img.mask(imgMask);
}
for (int i = 0; i < bouvier.pixels.length; i++) {
int r_i = (bouvier.pixels[i] >> 16) & 0xFF; // Faster way of getting red(argb)
int g_i = (bouvier.pixels[i] >> 8) & 0xFF; // Faster way of getting green(argb)
int b_i= bouvier.pixels[i] & 0xFF; // Faster way of getting blue(argb)
if (r_i == r && g_i == g && b_i == b) {
float h = CouleurPerso;
//float h = 128;
float s = SaturPerso;
float b =brightness(bouvier.pixels[i]);
//println("h =" + h + " s=" + s + " b=" +b);
img.pixels[i] = color(h, s, b);
}
img.updatePixels();
}
image(bouvier, xPerso, yPerso, sPerso, sPerso); //permet de garder les parties blanches de l'image
image(img, xPerso, yPerso, sPerso, sPerso);
}
//for (int i = 0; i < img.pixels.length; i++) {
// img.pixels[i] = color(0, 90, 102, i % img.width * 2);
//}
void serialEvent(Serial myPort) { // gestion des données envoyées par la carte
// read a byte from the serial port:
int inByte = myPort.read();
// if this is the first byte received, and it's an A,
// clear the serial buffer and note that you've
// had first contact from the microcontroller.
// Otherwise, add the incoming byte to the array:
if (firstContact == false) {
if (inByte == 'A') {
myPort.clear(); // clear the serial port buffer
firstContact = true; // you've had first contact from the microcontroller
myPort.write('A'); // ask for more
}
} else {
// Add the latest byte from the serial port to array:
serialInArray[serialCount] = inByte;
serialCount++;
// If we have NbData bytes:
if (serialCount > NbData-1) {
ChoixPerso=serialInArray[0];
CouleurPerso = serialInArray[1]; //rouge
xPerso =0.2*width +2*serialInArray[2];
yPerso = 0.53*height + serialInArray[3];
sPerso = 12*serialInArray[3];
SaturPerso = serialInArray[3];
// print the values (for debugging purposes only):
println(ChoixPerso + "\t" + CouleurPerso + "\t" + xPerso + "\t" + yPerso + "\t" + sPerso);
// Send a capital A to request new sensor readings: Envoie d'une letter "A" pour signifier à la carte Arduino de renvoyer des données
myPort.write('A');
// Reset serialCount:
serialCount = 0;
}
}
}
Réalisation de la maquette
vidéos, photos du making of…
wiki/flossmanuals/boitier-interactif-01/accueil.txt · Dernière modification: 2021/10/31 15:23 de lise
Sauf mention contraire, le contenu de ce wiki est placé sous les termes de la licence suivante : CC Attribution-Noncommercial 4.0 International
